
这个话题是最近开始学习和总结的,力求把四元数的基础相关知识汇总完。在大学的时候就偶尔听到过四元数,不过由于没有实际使用,就没过多的深入了解。机缘巧合,最近在工程代码里看到了关于四元数的计算相关代码,顺藤摸瓜,就把四元数的前世今生都搜了搜,学习和记录下,以备以后使用。
什么是四元数?
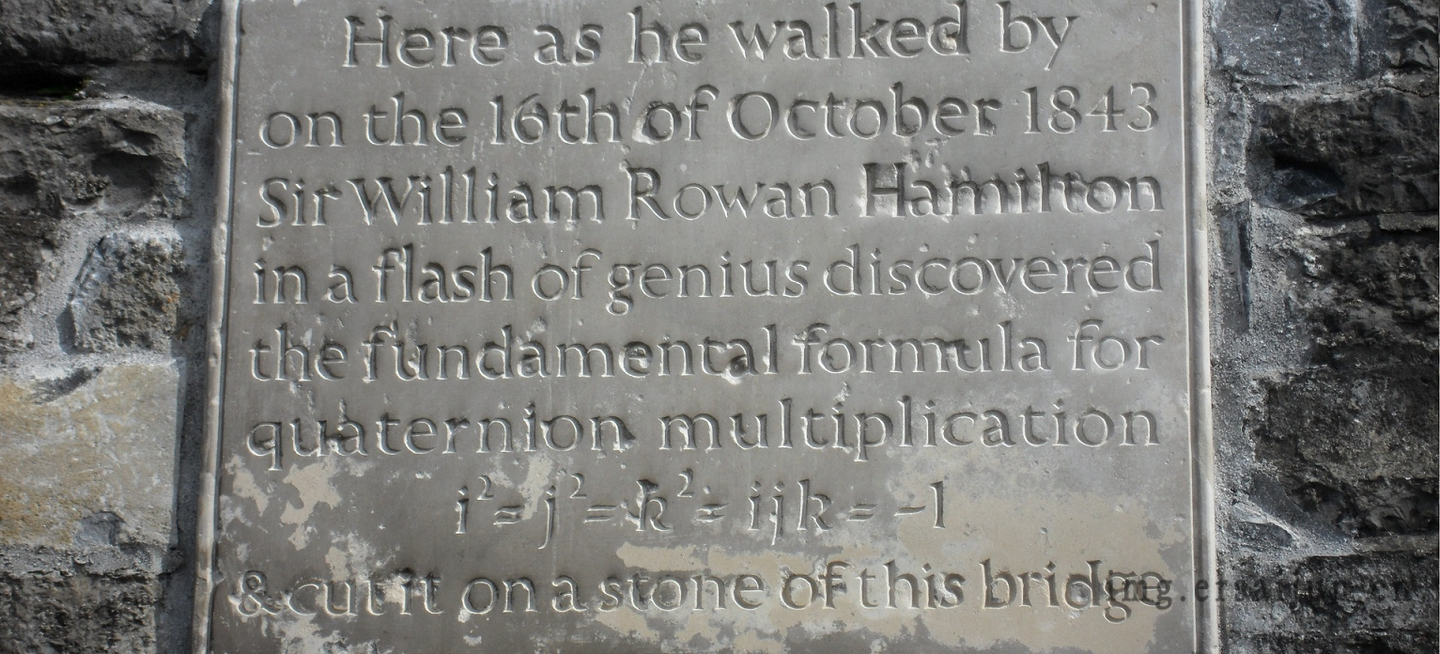
四元数的来历是在复数的基础上经过几十年偶然发展来的,我们用\(a+bi\)表示复数,二元数,其中\(i^{2} =-1\)。四元数是在复数的基础上增加了\(j\)和\(k\),由Hamilton在1843年发现的。
一个四元数\(q\) 可以被定义以下形式,相互等价。
$$q=a+bi+cj+dk = a + \vec{v} , (a,b,c,d \in \mathbb{R} )$$
其中,\(\vec{v} = bi+cj+dk = (b,c,d)\)
\(a\)为四元数\(q\)的实部, \(vec{v}\) 是虚部, \(i,j,k\) 为虚数单位(imaginary units)。
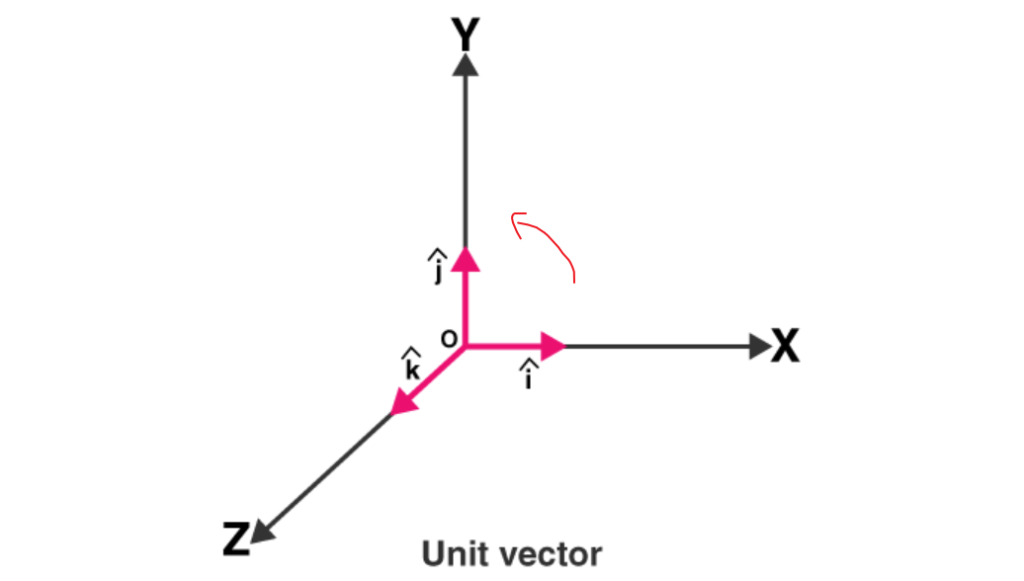
以上是一些基本概念,其中\(i,j,k\)的相乘转换结果,看起来毫无头绪,我们将它放在三维坐标里可以发现规则。可以通过建立坐标和右手法则得出,我们以\(ki\)为例,可以理解为将\(i\)左乘\(k\)变换,大拇指方向为\(k\)方向,将\(i\)转动90°,得到的结果是\(j\),\(ki=j\)。其他相乘类似,你可以试一下。
一些性质
- 模长:\(\parallel q\parallel = \sqrt{(a^{2} +b^{2}+c^{2}+d^{2})} = \sqrt{(a+v\cdot v)}\)
- 共轭:虚部取反即可。\(q=a-bi-cj-dk \)
- 纯四元数:实部为0的四元数,即\(q=0+bi+cj+dk\)
- 单位四元数:模长为1的四元数
四元数四则运算
首先四元数的乘法运算不满足交换律,即一般情况下:\(pq \ne qp\)
四元数的加减: 对应部分相加相减。
四元数的乘法:对应项相乘,然后利用
四元数的除法:一般对四元数不做除法,用逆取而代之。
四元数的逆
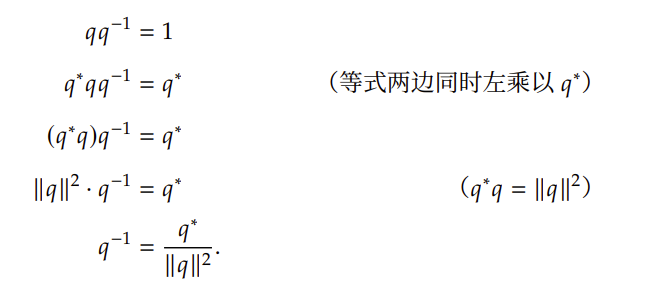
当\(q\)为单位四元数时,模长为1,逆与共轭相同,这种方式求逆比较简洁。
四元数可视化
3Blue1Brown通俗易懂的视频推荐,需要多看几遍。
四元数点乘
float QuaternionMath::QuaternionDot(const Quaternion &a, const Quaternion &b)
{
float rt = a.w * b.w + a.x * b.x + a.y * b.y + a.z * b.z;
return rt;
}这段代码是一个计算两个四元数的点乘的函数实现。给定两个四元数 \(a\) 和 \(b\),它们的点乘定义为:
$$
\text{dot}(a, b) = a.w \cdot b.w + a.x \cdot b.x + a.y \cdot b.y + a.z \cdot b.z
$$
其中,\(a.w, a.x, a.y, a.z\) 分别表示四元数 \(a\) 的实部和虚部分量,\(b.w, b.x, b.y, b.z\) 分别表示四元数 \(b\) 的实部和虚部分量。
函数中的代码实现了这个点乘的计算,并返回结果。即先将四元数的对应分量相乘,然后将它们相加得到最终的结果。该函数返回的结果是一个浮点数。
点乘的意义:
四元数的点乘(dot product)是指两个四元数之间进行元素对应相乘,并将结果相加得到一个标量值的操作。点乘在四元数中有以下含义:
- 量化两个四元数之间的相似度:点乘可以用来衡量两个四元数之间的相似度或相关性。如果两个四元数的点乘结果接近于1,则它们表示的方向相似或平行;如果点乘结果接近于-1,则它们表示的方向相反;如果点乘结果接近于0,则它们表示的方向垂直或无关。
- 判断四元数是否归一化:点乘可以用来检查四元数是否归一化。如果一个四元数是单位四元数(长度为1),则它与自身的点乘结果为1。因此,通过计算一个四元数与自身的点乘,可以验证它是否已经被归一化。
- 计算四元数的长度(模)的平方:点乘的结果可以用来计算四元数的长度(模)的平方。如果一个四元数为 \(q = a + bi + cj + dk\),则它的长度的平方为 \(|q|^2 = a^2 + b^2 + c^2 + d^2\)。点乘 \(q \cdot q\) 的结果恰好等于四元数的长度的平方。
- 判断四元数是否共线:如果两个四元数的点乘结果为0,则它们表示的方向垂直,可以判断它们不共线。如果点乘结果不为0,则可以判断它们共线,并且点乘的结果的正负号可以表示它们的相对方向。
总的来说,四元数的点乘提供了一种度量、判断和计算四元数之间关系的方法,包括相似度、长度、共线性等。
四元数与旋转矩阵
用四元数的主要目的就是要表示3D旋转,空间三维旋转。
空间三维旋转矩阵的表示形式有欧拉角、轴角和四元数。欧拉角的形式比较多,根据旋转顺序的不同有旋转矩阵有不同的结果,但是有万向死锁的问题存在,丢失自由度。
那么我们用四元数如何表示3D旋转呢?
假设一个向量\(v\)沿着旋转轴\(u\)旋转\(θ\)°之后的向量为\({v}’\),那么可以用四元数表示这个旋转\(q=[cos(\theta /2),sin(\theta /2)u]\),令\(\upsilon =[0, v]\) 纯四元数,那么可以得到向量经过旋转后的向量(纯四元数)为
$${\upsilon}’ =qvq^{*} = qvq^{-1}$$
我们四元数中的角度,真实对应两倍的旋转角度。具体分析可以参考本文末尾的PDF。
由以上分析之后,可以很轻松的通过单位四元数,得到旋转的轴角。
$$q=[a,b ]\\
\theta /2 = cos^{-1}(a)\\
\vec{v} = \frac{b}{sin(cos^{-1}(a))}$$
四元数的插值
首先说明,为什么要插值?
我们在设置目标物体旋转时,比如从A姿态变换到B姿态,对于变换过程中的姿态该如何平滑的转动呢?考虑到均匀匀速等,插值的目的是让整个姿态的旋转过程平滑过渡。
四元数的插值包括三种:线性插值Lerp(Linear Interpolation)、正规化线型插值Nlerp(Normalized Linear Interpolation)、球面插值Slerp(Spherical Linear Interpolation)。
对于两个四元数夹角很小的情况使用Nlerp,对于夹角很大的情况,先进行点乘判断夹角大小,如果方向相反,则先对任意一个四元数取反。那么为什么取反,四元数表示的矩阵相同呢?即\(q与-q\)表示的旋转是一样的。
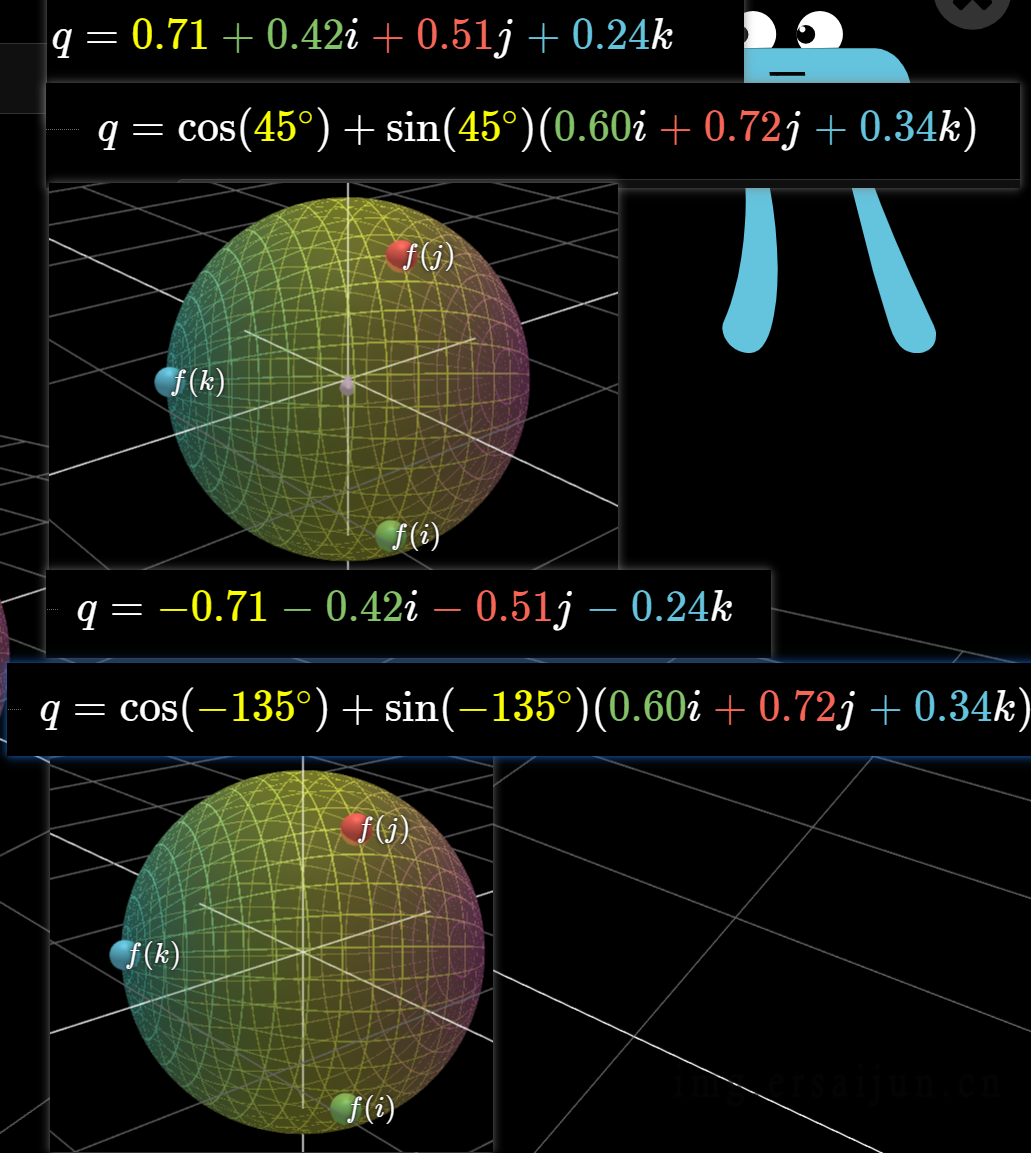
以上图片是我截取的视频里的,可以看到q与-q在空间中的旋转是一致的。
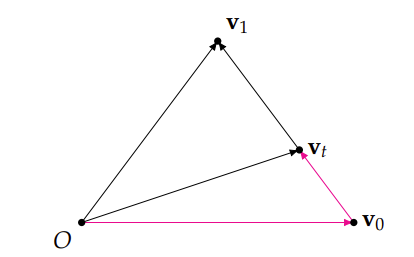
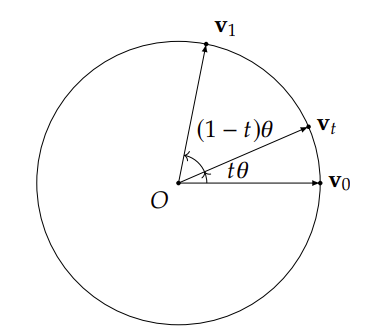
- 线性插值

- 正规化线型插值
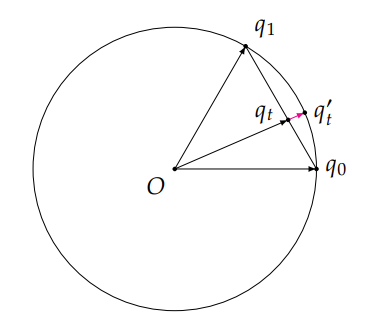

- 球面插值

代码实现
#include <Eigen/Dense>
Eigen::Quaterniond slerp(const Eigen::Quaterniond& q1, const Eigen::Quaterniond& q2, double t) {
// 归一化四元数
Eigen::Quaterniond q1_normalized = q1.normalized();
Eigen::Quaterniond q2_normalized = q2.normalized();
// 判断方向是否一致,如果不一致则取反
if (q1_normalized.dot(q2_normalized) < 0) {
q2_normalized = -q2_normalized;
}
// 计算角度差和插值权重
double dot_product = q1_normalized.dot(q2_normalized);
double theta = std::acos(dot_product);
double sin_theta = std::sqrt(1 - theta * theta );
// 如果角度差较小,使用线性插值
if (std::abs(sin_theta) < 1e-8) {
return (1 - t) * q1_normalized + t * q2_normalized;
}
double weight1 = std::sin((1 - t) * theta) / sin_theta;
double weight2 = std::sin(t * theta) / sin_theta;
// 执行球面插值
Eigen::Quaterniond interpolated = q1_normalized * weight1 + q2_normalized * weight2;
return interpolated.normalized();
}
// 注:以上代码由ChatGPT生成推荐阅读附录中的交互视频和文档,会有更多的收获。
以上是整体的关于四元数的全部内容了,如果有没涉及到的部分,我会在以后的时间更新本文。
二赛君整理,转载请注明地址和出处。
附录
Visualizing quaternions, an explorable video series (eater.net)【推荐】
四元数与三维旋转-Krasjet【推荐】